We show how to work with Decision trees at the Sklearn library.
Sklearn.tree; Sklearn tree examples
from matplotlib.colors import ListedColormap from sklearn import model_selection, datasets, metrics, tree import numpy as np
%pylab inline
Data generation
We will solve the problem of multi-class classification. For that we generate data from sklearn datasets: 3 classes with 2 features each. These features will be shown as x and y coordinates.
classification_problem = datasets.make_classification(
n_features = 2, n_informative = 2,
n_classes = 3, n_redundant=0,
n_clusters_per_class=1, random_state=3)
# features print(classification_problem[0].shape) classification_problem[0][:3]
(100, 2)
array([[ 2.21886651, 1.38263506],
[ 2.07169996, -1.07356824],
[-1.93977262, -0.85055602]])
# let"s output labels (targets) classification_problem[1]
array([0, 1, 2, 0, 0, 2, 0, 1, 0, 1, 0, 0, 1, 1, 2, 1, 1, 1, 1, 0, 1, 2,
2, 1, 1, 0, 2, 1, 2, 2, 1, 1, 1, 0, 0, 0, 1, 1, 0, 2, 2, 0, 0, 2,
0, 1, 2, 2, 0, 0, 2, 2, 2, 0, 2, 2, 2, 1, 1, 2, 0, 1, 0, 1, 2, 0,
0, 2, 2, 0, 0, 2, 0, 0, 0, 2, 1, 0, 1, 2, 0, 1, 0, 0, 0, 2, 0, 2,
1, 2, 0, 1, 2, 1, 1, 1, 1, 2, 0, 2])
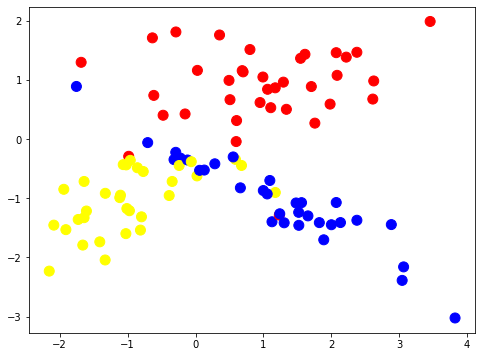
We plot out the colored dataset labels on the 2 features surface, x, y.
# colormap list for the classes dataset (as marks/dots) colors = ListedColormap(["red", "blue", "yellow"]) # colormaps for the building of dividing surfaces light_colors = ListedColormap(["lightcoral", "lightblue", "lightyellow"])
pylab.figure(figsize=(8,6))
pylab.scatter(list(map(lambda x: x[0], classification_problem[0])), list(map(lambda x: x[1], classification_problem[0])),
c=classification_problem[1], cmap=colors, s=100)
Split dataset for train and test subsets.
train_data, test_data, train_labels, test_labels = model_selection.train_test_split( classification_problem[0], classification_problem[1], test_size = 0.3, random_state = 1)
clf = tree.DecisionTreeClassifier(random_state=1) clf.fit(train_data, train_labels)
DecisionTreeClassifier(random_state=1)
predictions = clf.predict(test_data) metrics.accuracy_score(test_labels, predictions)
0.7666666666666667
predictions
array([0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 2, 2, 2, 2, 2, 1, 0, 1, 0, 2, 2, 0,
2, 0, 0, 0, 2, 1, 2, 0])
def get_meshgrid(data, step=.05, border=.5,):
x_min, x_max = data[:, 0].min() - border, data[:, 0].max() + border
y_min, y_max = data[:, 1].min() - border, data[:, 1].max() + border
return np.meshgrid(np.arange(x_min, x_max, step), np.arange(y_min, y_max, step))
def plot_decision_surface(estimator, train_data, train_labels, test_data, test_labels,
colors = colors, light_colors = light_colors):
#fit model
estimator.fit(train_data, train_labels)
#set figure size
pyplot.figure(figsize = (16, 6))
# plot decision surface on the train data
pyplot.subplot(1,2,1)
xx, yy = get_meshgrid(train_data)
mesh_predictions = np.array(estimator.predict(np.c_[xx.ravel(), yy.ravel()])).reshape(xx.shape)
# draw the dividing surface
pyplot.pcolormesh(xx, yy, mesh_predictions, cmap = light_colors)
# above the surfaces we put the class labels (train data)
pyplot.scatter(train_data[:, 0], train_data[:, 1], c = train_labels, s = 100, cmap = colors)
pyplot.title("Train data, accuracy={:.2f}".format(metrics.accuracy_score(train_labels, estimator.predict(train_data))))
# plot decision surface on the test data
pyplot.subplot(1,2,2)
pyplot.pcolormesh(xx, yy, mesh_predictions, cmap = light_colors)
pyplot.scatter(test_data[:, 0], test_data[:, 1], c = test_labels, s = 100, cmap = colors)
pyplot.title("Test data, accuracy={:.2f}".format(metrics.accuracy_score(test_labels, estimator.predict(test_data))))
Decision trees
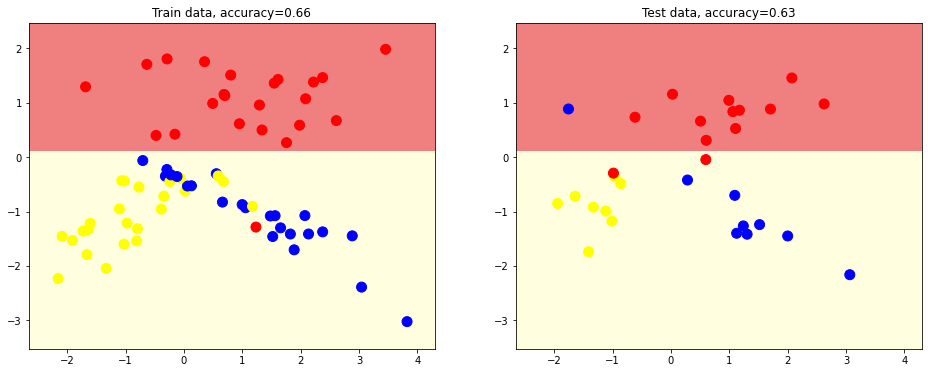
We generate simple decision tree with max depth = 1
# simple decision tree with max depth = 1 estimator = tree.DecisionTreeClassifier(random_state = 1, max_depth = 1) plot_decision_surface(estimator, train_data, train_labels, test_data, test_labels)
We now creare a better desition tree with depth 2.
# we build decision tree of depth=2 and plot out the dividing surfaces
plot_decision_surface(tree.DecisionTreeClassifier(random_state = 1, max_depth = 2),
train_data, train_labels, test_data, test_labels)
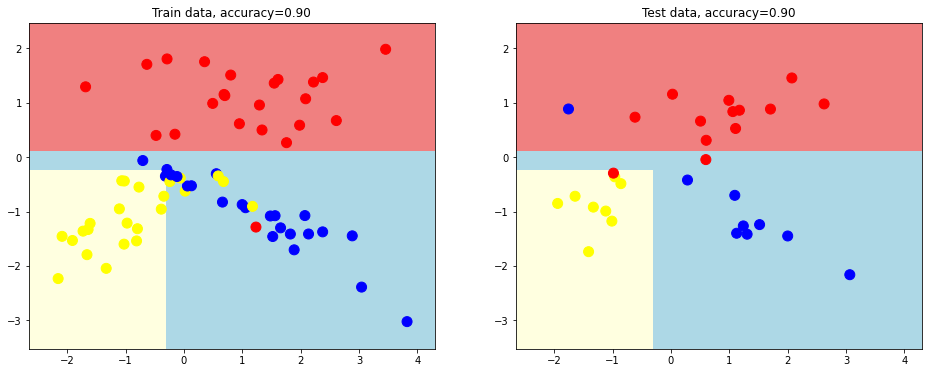
We creare another desition tree with depth equal 3.
# tree depth = 3
plot_decision_surface(tree.DecisionTreeClassifier(random_state = 1, max_depth = 3),
train_data, train_labels, test_data, test_labels)
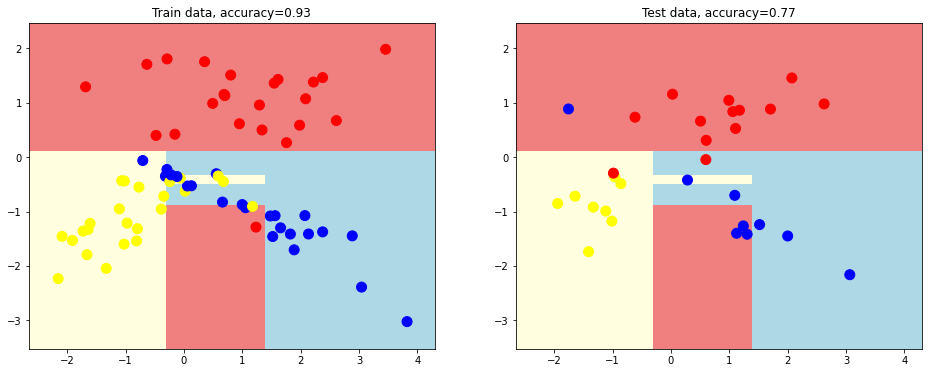
# dividing surfaces without decision tree depth limit
plot_decision_surface(tree.DecisionTreeClassifier(random_state = 1),
train_data, train_labels, test_data, test_labels)
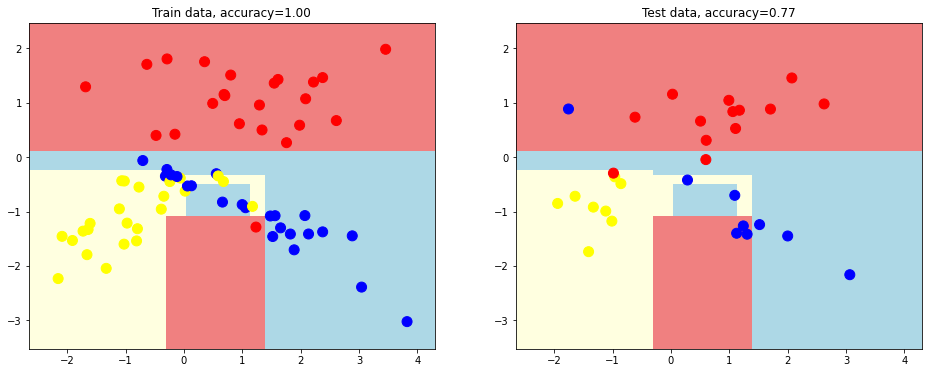
This kind of decision tree looks overfitting.
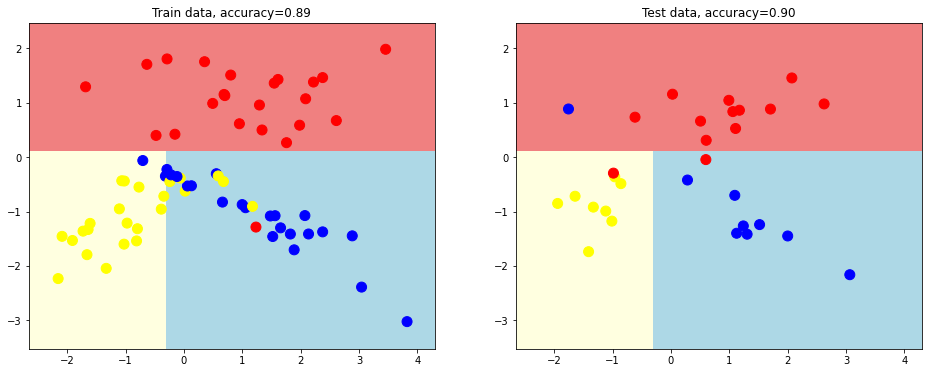
Solve overfitting
Let’s try to solve overfitting. We define the minimum objects (samples) at the leaf node: min_samples_leaf = 3
plot_decision_surface(tree.DecisionTreeClassifier(random_state = 1, min_samples_leaf = 3),
train_data, train_labels, test_data, test_labels)